Advanced PMP Solution Analysis
Explore the analysis of a basic PMP solution to find the optimal control that minimizes a given function, incorporating necessary conditions and constraints. Understand the dimensions of the PMP solution, including unknowns, state, co-state, and control variables. Learn how to handle additional constraints like final state and time constraints using Lagrange multipliers.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author. If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
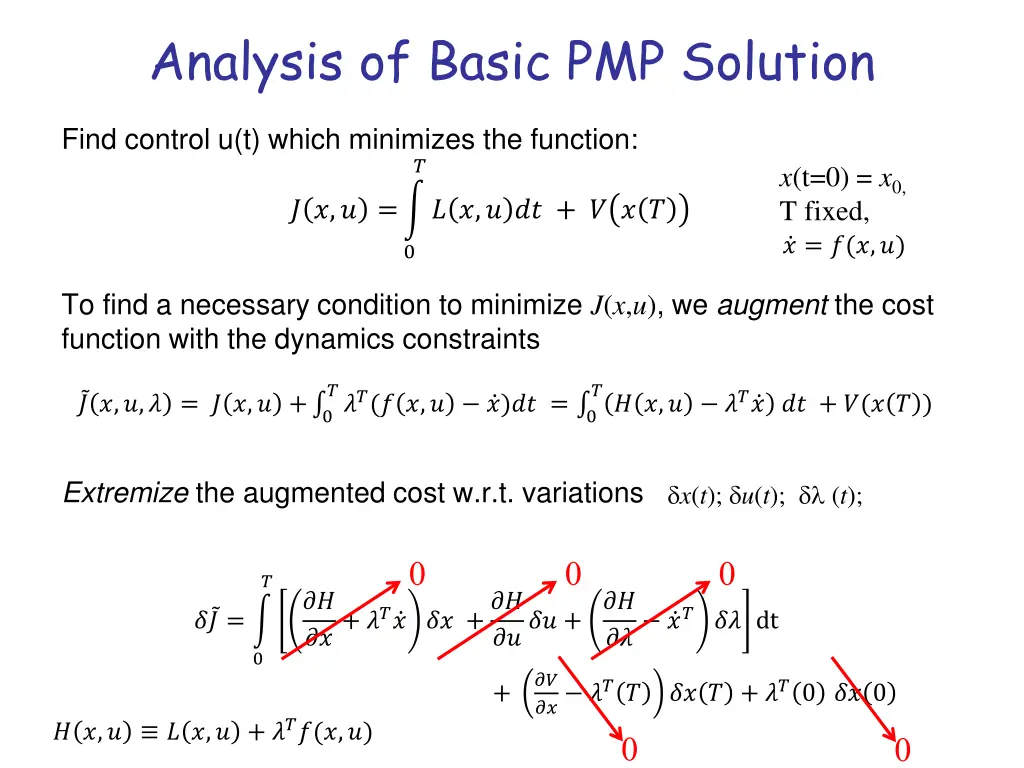
Analysis of Basic PMP Solution Find control u(t) which minimizes the function: ? x(t=0) = x0, T fixed, ? = ?(?,?) ? ?,? = ? ?,? ?? + ? ? ? 0 To find a necessary condition to minimize J(x,u), we augment the cost function with the dynamics constraints ???(? ?,? ?)?? = 0 ?? ?,? ?? ? ?? + ?(? ? ) ? ?,?,? = ? ?,? + 0 Extremize the augmented cost w.r.t. variations x(t); u(t); (t); ? ?? ??+ ?? ? ?? +?? ?? ?? ???? dt ? ? = ???? + 0 ?? ?? ??? + ? ?,? ? ?,? + ???(?,?) ?? ? + ??0?? 0
Dimension of PMP Solution Unknowns n state variables x(t) n co-state variables ?(t) m control variables u(t) Optimal control satisfies: ? ?? ? n o.d.e.s with I.C.s ? = = ?(?,?) ? 0 = ?0 2 point B.V. problem ? ?? ?? ? =?? n o.d.e.s with T.C.s ??? ? = ?? ??= 0 ; m algebraic equations
Additional Constraints? Example: what if final state constraints i(x(T))=0, i=1, ,p are desired: Add constraints to cost using additional Lagrange multipliers Multipliers ? ???,? = ? ?,? ?? + ? ? ? + ?1?1? ? + + ????? ? 0 Cost augmentation Extremizing the constrained, augmented the cost function yields ? ?? ? n o.d.e.s with I.C.s ? = = ?(?,?) ? 0 = ?0 ? ?? ?? ? =?? ?? ??(? ? ) ? n o.d.e.s with T.C.s = ??(? ? ) + ?? ??= 0 ; m algebraic equations ?1? ? = 0; ; ??? ? = 0 p algebraic equations
Additional Constraints? Example: what if final time is undetermined? Final time T is an additional variable H(T) = 0 gives one additional constraint equation!



