Comparative Study on Robotic Arm Trajectory Optimization
This project aims to compare trajectory optimization methods for robotic arms, utilizing Dijkstra's Algorithm for end effector path movement and Genetic Algorithm for minimizing joint rotations. The student will propose an optimal path considering defined target points, integrating both algorithms for optimal results.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
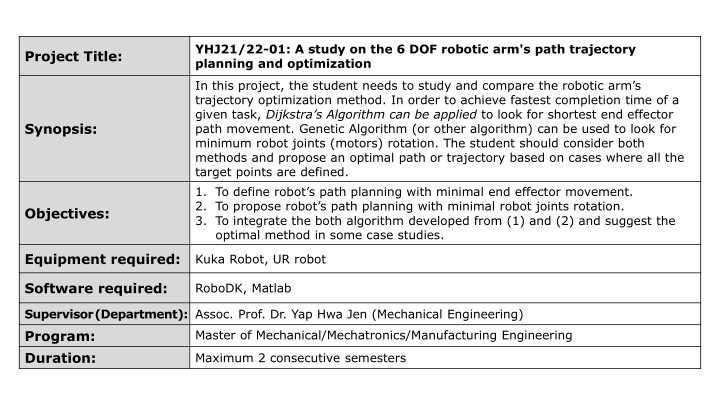
YHJ21/22-01: A study on the 6 DOF robotic arm's path trajectory planning and optimization Project Title: In this project, the student needs to study and compare the robotic arm s trajectory optimization method. In order to achieve fastest completion time of a given task, Dijkstra s Algorithm can be applied to look for shortest end effector path movement. Genetic Algorithm (or other algorithm) can be used to look for minimum robot joints (motors) rotation. The student should consider both methods and propose an optimal path or trajectory based on cases where all the target points are defined. 1. To define robot s path planning with minimal end effector movement. 2. To propose robot s path planning with minimal robot joints rotation. 3. To integrate the both algorithm developed from (1) and (2) and suggest the optimal method in some case studies. Synopsis: Objectives: Equipment required: Kuka Robot, UR robot Software required: RoboDK, Matlab Supervisor(Department): Assoc. Prof. Dr. Yap Hwa Jen (Mechanical Engineering) Program: Master of Mechanical/Mechatronics/Manufacturing Engineering Duration: Maximum 2 consecutive semesters
YHJ21/22-02: A study on the motion capture techniques effectiveness in manufacturing production floor environment Project Title: In this project, the student needs to study and compare the 3 types of human motion capture techniques available, namely image processing detection, infrared depth sensor detection and motion capture sensor system. Unity plugin, OpenPose with a webcam will be used as image processing detection representation, Kinect sensor will represent infrared depth sensor detection and HTC Vive trackers will be used to represent motion capture sensor system. The above systems shall be studied and compared in term of accuracy, system setup efficiency, level of disturbance during tracking, etc. Case studies shall be conducted to test all the 3 methods at once. 1. To implement image processing, infrared depth sensor and motion capture sensor system to capture human posture. 2. To identify the essential elements to evaluate human body posture for production processes. 3. To study the effectiveness of image processing, infrared depth sensor and motion capture sensor system for motion capture at production floor. Synopsis: Objectives: Equipment required: Webcam, Kinect, HTC Vive Software required: Unity3D Supervisor(Department): Assoc. Prof. Dr. Yap Hwa Jen (Mechanical Engineering) Program: Master of Mechanical/Mechatronics/Manufacturing Engineering Duration: Maximum 2 consecutive semesters
YHJ21/22-03: Real-time Postural Risks Assessment System for Upper Body Ergonomics using Augmented Reality (AR) Technology Project Title: The idea of the project is to capture the motion of the workers while performing a task in real-time. The virtual skeleton will be used to superimpose to his/her motion in real-time using augmented reality technology and the data will be assessed to identify potential awful postures/motions. The assessors can see performance and evaluation score of the user. They will be alarmed by the indicator in the head-up display if the posture of the user is incorrect, which able to remind/teach the user immediately. 1. to develop the digital human model in the Augmented Reality simulated environment 2. to integrate the RULA assessment in the AR-based digital human model Synopsis: Objectives: Equipment required: AR Glasses / Handheld Device Software required: Unity3D Supervisor(Department): Assoc. Prof. Dr. Yap Hwa Jen (Mechanical Engineering) Program: Master of Mechanical/Mechatronics/Manufacturing Engineering Duration: Maximum 2 consecutive semesters
YHJ21/22-04: Design & Development of an Augmented Reality Assisted Seven-axis Robot in-situ Path Teaching and Optimization Project Title: This project is aimed to develop an Augmented Reality-based system for seventh- axis robotics work cell (or mobile industrial robotics work cell). The AR technology will be used to teach the robot path, which taught path will be used to generate/optimize for a shorter robot path, faster production time and/or safer robot movement. The paths (taught/generated) can be simulated in the AR environment for evaluation, comparison and fine-tuning purpose. 1. to develop an 7-axis robotics path teaching using Augmented Reality Technology 2. to integrate the machine learning algorithm in the optimization module 3. to generate the optimized path for the robotics work cell." Synopsis: Objectives: Equipment required: AR Glasses, Industrial Robots Software required: Unity3D Supervisor(Department): Assoc. Prof. Dr. Yap Hwa Jen (Mechanical Engineering) Program: Master of Mechanical/Mechatronics/Manufacturing Engineering Duration: Maximum 2 consecutive semesters
YHJ21/22-05: Development of a Gamified Virtual Reality-based Balancing Training for the Athletes Project Title: This project is aimed to design a VR-based balancing training module for the athletes. The gamified training module will facilitate practice and identify the key benefits in motivating and engaging athletes to effectively learn the balancing skills correctly and safely. By blending the gamification into the VR-based training, it is expected that the motivation and satisfaction of the trainees (athletes) can be improved compared to the conventional training method. 1. to develop a VR-based training module in a ""sport"" 2. to optimized the human-computer interface with the game theory 3. to investigate the effectiveness of the gamified VR-based sport training module" Synopsis: Objectives: Equipment required: VR Glasses & tools Unity3D Software required: Supervisor(Department): Assoc. Prof. Dr. Yap Hwa Jen (Mechanical Engineering) Program: Master of Mechanical/Mechatronics/Manufacturing Engineering Duration: Maximum 2 consecutive semesters





![❤[READ]❤ Robotic Exploration of the Solar System: Part I: The Golden Age 1957-19](/thumb/21623/read-robotic-exploration-of-the-solar-system-part-i-the-golden-age-1957-19.jpg)