Control Software Engineer at Sesame - Background in Electrical Engineering and Robotics
Amro Aljadaa is a Control Software Engineer at SESAME with expertise in developing graphical user interfaces using Qt, creating drivers for controllers, and utilizing C++ and Python for various services in machine control. His background includes work in embedded systems, image processing, AI, electronic design automation, and robotics. Additionally, he is skilled in software management with Docker for containerizing projects, fast orbit feedback for beam position correction, control system design, and digital signal processing.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author. If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
Amro Aljadaa CONTROL SOFTWARE ENGINEER @SESAME
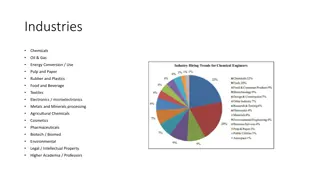
Background Electrical Engineering Embedded Systems Image Processing & AI
Background Electronic design automation Robotics
SESAME We use C++ to: Develop graphical user interfaces using Qt Develop Drivers for controllers
SESAME We use Python to write scripts that perform various services for the machine, including: monitoring machine performance Controlling motors Image Processing Event driven systems
ARM Robot Sample changing in MS beamline State driven control Safety features Interface the arm with the controller and the sensors
Software Management Docker for Containerizing IOCs and GUI projects Eases maintaining and managing them in different environments. This will make the IOCs portable and able to run on any operating system on any machine - with docker installed - without worrying about dependencies and versions. Moving from development to production is very fast. CI/CD on the way!
Fast Orbit Feedback Correct beam position in the ring code in C++ and efficiency is extremely important
Control System Design
Sampling Digital filters Digital Signal Processing