Exploring Robotics in Mechatronics: ELC4047 Course Overview
Dive into the world of robotics with the elective course ELC4047, focusing on classification, types, motion, and planning. Understand the relationship between robotics and mechatronics, and explore different types of robots such as vehicles, humanoid, snake, spider, quad-rotor, and serial robot arm. Learn about robot motion through kinematics and dynamics, and the use of matrices and homogenous transformation for position determination. Join Prof. Ahmed Ali Abouelsoud in unraveling the complexities of robotic systems in this informative course.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author. If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
Elective Course Robotics ELC4047 Prof Ahmed Ali Abouelsoud 2023/24 1
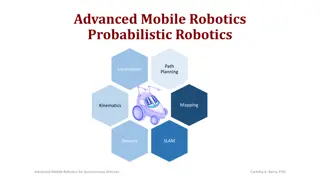
This course studies robotics in terms of classification, types, motion description and planning Robotics is part of mechatronics which is a merge between mechanics , control electronics, and computer 2
The type of robot is determined by the application Vehicle Homidoid 3
Snake Spider 4
Quad rotor Serial arm 5
The course concentrates on serial robot arm (manipulator) and describes its motion, control and trajectory planning. Robot motion is studied through kinematics (position, orientation, velocity, acceleration) and dynamics (force and torque). 6
Robot arm is essentially rigid multi-bode system of links joined by rotary or prismatic joints and actuated by electric motors. To systematize the method of determining the position, orientation, etc... we use matrices and in particular homogenous transformation. 7