Field Hazard Sensor Configurations and Thresholds
Explore the various configurations and thresholds for field hazard sensors, including detection thresholds, ROC curves, and Mine Countermeasures search phases. Understand how users can optimize sensor performance based on their preferences and operational requirements.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author. If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
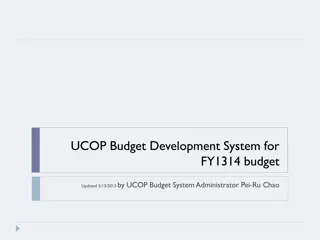
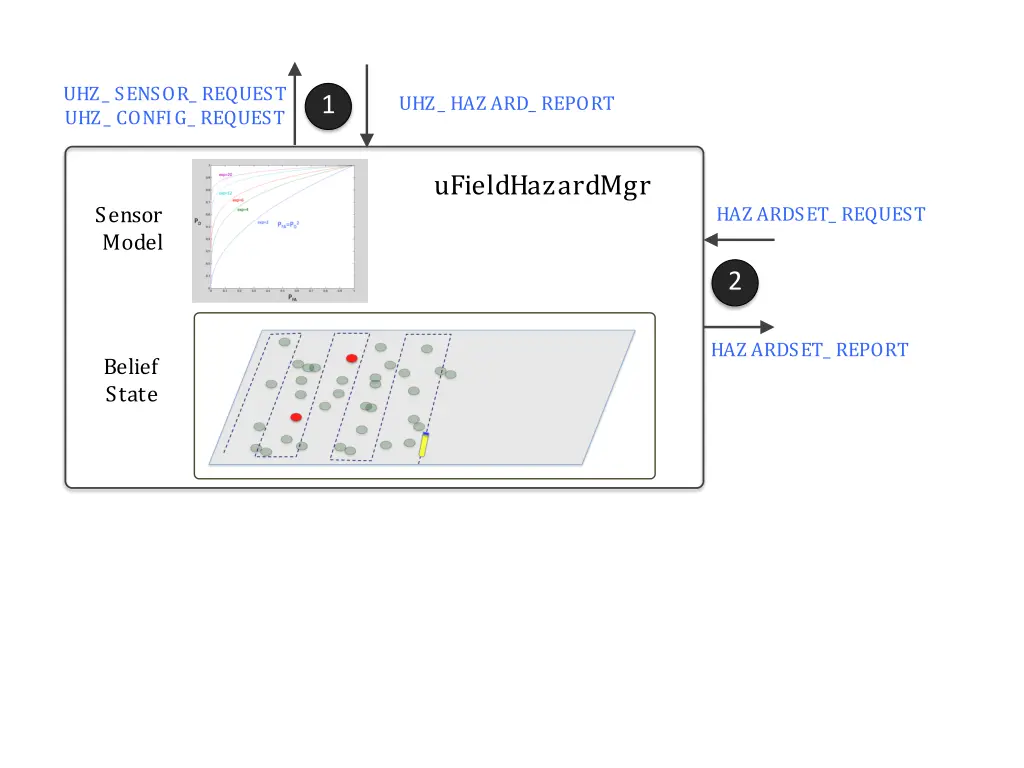
UHZ_ SENSOR_ REQUEST UHZ_ CONFIG_ REQUEST UHZ_ HAZARD_ REPORT 1 uFieldHazardMgr Sensor Model HAZARDSET_ REQUEST 2 HAZARDSET_ REPORT Belief State
In-Field Topology pMarineViewer uFldHazardSensor MOOSDB Hazard File Other Apps pShare UHZ_HAZARD_REPORT UHZ_CONFIG_ACK UHZ_CONFIG_REQUEST Shoreside UHZ_SENSOR_REQUEST NODE_REPORT HAZARDSET_REPORT Net Work Vehicles HAZARDSET_REQUEST pShare uFldHazardMgr MOOSDB pHelmIvP pNodeReporter
UHZ_ SENSOR_ REQUEST UHZ_ CONFIG_ REQUEST UHZ_ SENSOR_ REPORT 1 uFieldHazardMgr Sensor Model HAZARD_ REPORT_ REQ 2 HAZARD_ REPORT_ REQ Belief State
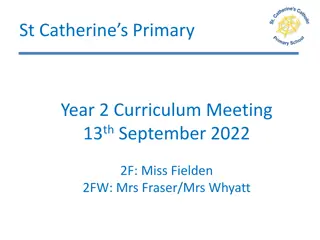
The uFldHazardSensor Detection Threshold ideal sensor: PD=1, PFA=0 Detection Threshold: The ideal is to have a probability of detection PD=1 for actual hazards. Equally ideal is a probabilty of false alarms, PFA=0 for benign objects. In practice, this is a tradeoff that is chosen by the user. The tradeoff curve is often referred to as a ROC curver. (receiver operating characteristic) The shape of the ROC curve is a fact life determined by your sensor and how it is configured to operate (e.g., swath width). The point on the ROC is chosen by the user. To simplify things in the uFldHazardSensor app, the shape of the ROC curve is determined by a single number: the exponent, e, in the equation: PFA=PDe. For e=4, if you want a PD of 0.9, you have to live with a PFA of 0.66
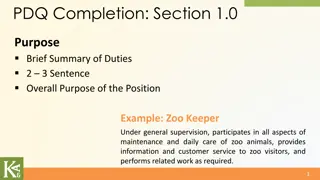
The uFldHazardSensor Detection Threshold ROC Curve Options: The sensor may have different configuration options, resulting in different ROC curves. In the uFldHazardSensor, the ROC curve shape is directly tied to the swath width. Bigger swath width, lower exponent. width and sensor performance is configure in the uFldHazardSensor configuration block with a series of options: sensor_config = width=50, exp=2, class=0.60 sensor_config = width=10, exp=6, class=0.93 uFldHazardSensor performance options: The relationship between swath sensor_config = width=25, exp=4, class=0.80 User configuration the user picks: The sensor configuration option (e.g., swath width of 25 meters) The point on the ROC curve: UHZ_CONFIG_REQUEST = vname=archie,width=25,pd=0.9 Fact of life Your choice
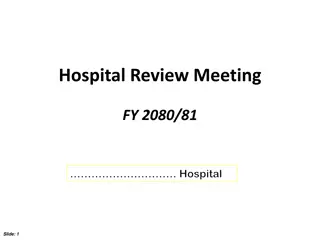
Mine Countermeasures Phases of Search: Analysis A Typical approach to MCM problem is to divide the mission into three phases: (1) Wide area search and detection - Uniform, exhaustive search (lawnmower pattern) - The result of this phase is a set of candidate objects and locations.
Mine Countermeasures Phases of Search: Re-acquire A Typical approach to MCM problem is to divide the mission into three phases: (1) Wide area search and detection (2) Re-aquire, identify, and classify: Re-visit each point of the first phase with a finer sensor. x x
Mine Countermeasures Phases of Search: Broad Area Search A Typical approach to MCM problem is to divide the mission into three phases: (1) Wide area search and detection - Uniform, exhaustive search (lawnmower pattern)
UUV (Contact) BEACON SIMAS_ RANGE_ REPORT (ping echo) RANGE_ REPORT (ping) SIMAS_ RANGE_ REQUEST (ping) UUV UUV








")
![❤[READ]❤ Deep Space Craft: An Overview of Interplanetary Flight (Springer Praxis](/thumb/21511/read-deep-space-craft-an-overview-of-interplanetary-flight-springer-praxis.jpg)