Gabor Transform: Definitions, Approximations, and Applications
Explore the Gabor Transform, including its definitions, approximations, and applications in signal processing and time-frequency analysis. Learn about the Gaussian function, uncertainty principle, and more in this comprehensive guide.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author. If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
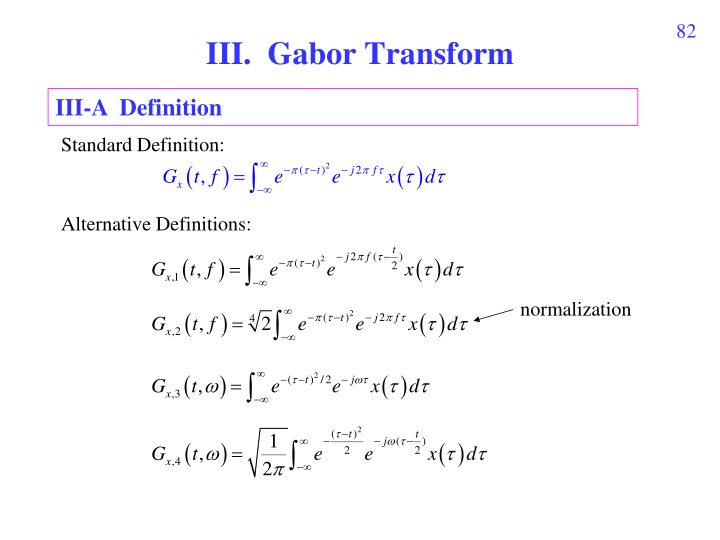
82 III. Gabor Transform III-A Definition Standard Definition: ( ) ( ) = 2 ( ) 2 t j f , G t f e e x d x Alternative Definitions: t 2 ( ) j f ( ) ( ) = 2 ( ) t ,1 , G t f e e x d 2 x normalization ( ) ( ) 2 = ( ) 2 t j f 4 , 2 G t f e e x d ,2 x ( ) ( ) = 2 ( ) /2 t j , G t e e x d ,3 x 2 ( ) t t 1 ( ) j ( ) ( ) = , G t e e x d 2 2 ,4 x 2
83 Main Reference S. Qian and D. Chen, Sections 3-2 ~ 3-6 in Joint Time-Frequency Analysis: Methods and Applications, Prentice-Hall, 1996. Other References D. Gabor, Theory of communication , J. Inst. Elec. Eng., vol. 93, pp. 429-457, Nov. 1946. ( Gabor transform) M. J. Bastiaans, Gabor s expansion of a signal into Gaussian elementary signals, Proc. IEEE, vol. 68, pp. 594-598, 1980. R. L. Allen and D. W. Mills, Signal Analysis: Time, Frequency, Scale, and Structure, Wiley- Interscience. S. C. Pei and J. J. Ding, Relations between Gabor transforms and fractional Fourier transforms and their applications for signal processing, IEEE Trans. Signal Processing, vol. 55, no. 10, pp. 4839-4850, Oct. 2007.
84 Note Gabor transform short-time Fourier transform (STFT) Gabor transform STFT special case.
85 III-B Approximation of the Gabor Transform Although the range of integration is from to , due to the fact that 2 a when |a| > 1.9143 0.00001 e 2/2 e when |a| > 4.7985 a 0.00001 the Gabor transform can be simplified as: 1.9143 + t ( ) ( ) 2 ( ) 2 t j f , G t f e e x d x 1.9143 t 2 ( ) t t 1 + ( ) 4.7985 j t ( ) ( ) = , G t e e x d 2 2 ,3 x 2 4.7985 t
86 III-C Why Do We Choose the Gaussian Function as a Mask (1) Among all functions, the Gaussian function has the advantage that the area in time-frequency distribution is minimal. ( STFT time-domain frequency domain ) w(t) time domain w(t) W(f) = FT[w(t)] frequency domain (2) Special relation between the Gaussian function and the rectangular function
87 (Note): Gaussian function FT eigenfunction Gabor transform time domain frequency domain 2 2 = 2 t j f t f e e dt e 2 2 j t = /2 /2 t f e e dt e 2 2 + = a e ( ) /4 at bt b a / e dt according to M. R. Spiegel, Mathematical Handbook of Formulas and Tables, McGraw-Hill, 3rdEd., 2009. Gaussian function is also an eigenmode in optics, radar system, and other electromagnetic wave systems. (will be illustrated in the 8thweek)
88 Uncertainty Principle (Heisenberg, 1927) For a signal x(t), if when |t| , then ( ) t x t = 0 t f 1/4 ( ) ( ) f df where , t = = 2 2 2 f 2 ( ) ( ) , t P t dt f P t x f X = ( ) = ( ) f df f P , t P t dt f X t x 2 | ( )| | ( )| x t x t 2 ( ) | ( )| ( )| X f X f = , P t ( ) f = , P x 2 dt X 2 | df
89 (Proof of Henseinberg s uncertainty principle): From simplification, we consider the case where t= f= 0 Then, use Parseval s theorem ( )| 2 2 2 | ( )| x t | t dt x t dt 1 = 2 t 2 f 2 4 2 2 | ( )| x t | ( )| x t dt dt = 2 2 | ( )| x t | ( )| X f dt df if X(f) = FT[x(t)]
90 2 ( ), ( ) x t x t ( ), ( ) y t y t ( ), ( ) x t y t From Schwarz s inequality 2 2 d dt d dt ( ) ( ) ( )| x t + 2 2 2 | ( )| x t | ( ) x t dt ( ) /2 t dt dt tx t tx t x t dt 2 d dt d dt ( ) ( ) (using |a+b|2+ |a b|2 2|a|2) + ( ) x t ( ) /4 tx t tx t x t dt 2 d dt 2 = = ( ) x t x t ( ) /4 ( ) ( ) ( ) ( ) x t x t dt /4 t dt tx t x t 2 = ( ) ( ) ( ) ( ) ( ) ( ) x t x t dt /4 tx t x t tx t x t t t 2 2 = ( ) x t /4 dt 1 1 2 t 2 f t f 2 16 4
91 For Gaussian function ( ) x t ( ) 2t 2 = = f e X f e ) | ( )| x t 2 2 2 2 ( | ( )| x t t dt t dt ( ) t = = = 2 t 2 ( ) t P t dt t x 2 2 | ( )| x t | ( )| x t dt dt t = 0 Since ( ) x t 2 2 = = 2 t ? dt e dt 2 2 + = a e ( ) /4 at bt b a / e dt use ( ) 3/ 2 1 ( ) 2 2 2 = = = = 2 2 2 2 2 t t 2 22(2 ) t x t dt t e dt t e dt 3/2 5/2 2 0 + [( 2 ) 1 1)/2] m a = 2 = use m at t e dt 1)/2 + ( m 0 ( ( ) n ( ) ( ) + = = , 3/ 2 / 2 n n 1/2
92 2 2 | ( )| x t t dt 1, 4 1 = = 2 t t = 2 | ( )| x t dt 4 1 = , f 4 Gaussian function 1 = t f 4 [ ] M. R. Spiegel, Mathematical Handbook of Formulas and Tables, McGraw-Hill, 3rdEd., 2009.
93 III-D Simulations Gabor transform for Gaussian function exp( t2) rec-STFT, B = 0.5 for Gaussian function exp( t2) 4 4 3 3 2 2 1 1 f-axis f-axis 0 0 -1 -1 -2 -2 -3 -3 -4 -4 -4 -3 -2 -1 t-axis 0 1 2 3 4 -4 -3 -2 -1 0 1 2 3 4 t-axis
94 x(t) = cos(2 t) when t < 10, x(t) = cos(6 t) when 10 t < 20, x(t) = cos(4 t) when t 20 Gabor 5 4 3 2 Frequency (Hz) 1 0 -1 -2 -3 -4 -5 0 5 10 15 20 25 30 Time (Sec)
95 Gabor transform of s(t) Gabor transform of r(t) 4 4 3 3 2 2 1 1 f-axis f-axis 0 0 -1 -1 -2 -2 -3 -3 -4 -4 -10 -5 0 5 10 -10 -5 0 5 10 t-axis t-axis ( ) ( ) s t s(t) = 0 otherwise, = 2 exp /10 3 jt j t for 9 t 1, ( ) ( ) r t = + 2 2 exp /2 6 exp j t ( 4) /10 jt t
96 Gabor transform for s(t) + r(t) 4 3 2 1 f-axis 0 -1 -2 -3 -4 -10 -5 0 5 10 t-axis
97 III-E Properties of Gabor Transforms ( ) ( ) = 2 2 ( ) j f t , G t f e e x d x (1) Integration property ( ) ( ) 2 2 t When k 0, = ( ) 0 2 ( 1) j kt f k , G t f e ( , x G t f df df e x kt x ) 2 = t e x When k = 0, When k = 1, (recovery property) ( ) , x G t f e ( ) x t = 2 j t f df (2) Shifting property ( ) ( ) = 2 j f t If y(t) = x(t t0), then . (3) Modulation property , , G t f G t t f e 0 0 y x ( ) ( ) If y(t) = x(t)exp(j2 f0t), then = , , G t f G t f f 0 y x
98 (4) Special inputs: ( ) (a) When x( ) = ( ), 2 = t , G t f e x ( ) 2 (b) When x( ) = 1, = 2 j f t f , G t f e e x (symmetric for the time and frequency domains) f f t t
99 (5) Power decayed property If x(t ) = 0 for t > t0, then . ( ) , x G t f df ( ) 2 2 2 2 ( t t ) , e G t f df 0 0 x ( ) ( ) 2 2 2 2 ( t t ) average of , average of , G t f e G t f i.e., for t > t0. (fix , vary ) t f 0 0 x x (fix , vary ) t f 0 (Proof): t t ( ) ( ) ( ) ( ) = = 2 2 ( ) 0 t 2 j f 0 ( ) 2 t j f 0, G t f e e x d , G t f e e x d 0 x x ) t + Since ( ( ) ( ) t t t 2 2 2 2 2 2 t t ( ) ( ) t ( ) t e e e 0 0 0 0 ( ) ( ) 2 t t ( ) , , G t f e G t f 0 0 x x If for f > f0, then ( ) ( ) X f FT x t = = 0 ( ) ( ) 2 2 2 2 ( ) f f average of , average of , G t f e G t f 0 for f > f0. 0 x x (fix , vary ) f (fix , vary ) f t t 0
100 (6) Linearity property If z( ) = x( ) + y( ) and Gz(t, f ), Gx(t, f ) and Gy(t, f ) are their Gabor transforms, then Gz(t, f ) = Gx(t, f ) + Gy(t, f ) (7) Power integration property: 1.9143 + u ( ) ( ) ( ) 2 2 2 2 2 2 ( 2 ( = ) ) t u , G t f df e x d e x d x 1.9143 u (8) Energy sum property ( ) ( ) ( ) ( ) = * y * , , G t f G t f df dt x y d x where Gx(t, f ) and Gy(t, f ) are the Gabor transforms of x( ) and y( ), respectively.
101 III-F Scaled Gabor Transforms ( ) ( ) 2 = ( ) 2 t j f , 4 G t f e e x d x (finite interval form) larger : higher resolution in the time domain lower resolution in the frequency domain smaller : higher resolution in the frequency domain lower resolution in the time domain
102 Gabor transform for Gaussian function exp( t2) Gabor transform for Gaussian function exp( t2) = 0.2 = 5 4 4 3 3 2 2 1 1 f-axis f-axis 0 0 -1 -1 -2 -2 -3 -3 -4 -4 -4 -3 -2 -1 0 1 2 3 4 -4 -3 -2 -1 0 1 2 3 4 t-axis t-axis
103 time resolution frequency resolution (1)Using the generalized Gabor transform with larger (2)Using other time unit instead of second t ( sec) f ( Hz) t ( 0.1 sec) f ( 10 Hz)
104 III-G Gabor Transforms with Adaptive Window Width For a signal, when the instantaneous frequency varies fast larger when instantaneous frequency varies slowly smaller ( ) ( ) t ( ) ( ) t 2 ( ) t = 2 j f , G t f e e x d 4 x (t) is a function of t S. C. Pei and S. G. Huang, STFT with adaptive window width based on the chirp rate, IEEE Trans. Signal Processing, vol. 60, issue 8, pp. 4065- 4080, 2012.
105 Matlab (1) (2) Matrix Vector operation (3) (4) ( debug) (5) Matlab Program (or Python program) Program
106 Matlab (1) function: (2) tic, toc: tic toc (3) find: vector 0 entry find([1 0 0 1]) = [1, 4] find(abs([-5:5])<=2) = [4, 5, 6, 7, 8] ( abs([-5:5])<=2 = [0 0 0 1 1 1 1 1 0 0 0]) (4) : Hermitian (transpose + conjugation) . : transpose (5) imread: ( Matlab imread double A=double(imread( Lena.bmp ));
107 (6) image: (i) image(A) % A has the size of MxNx1 colormap(gray(256) (ii) image(A) % A has the size of MxNx3 and the entries are integer (iii) image(A) % A has the size of MxNx3 and the entries are non-integer (7) imshow, imagesc : (8) imwrite: (9) aviread: video avi (10) VideoReader: video (11) VideoWriter: video
108 (12) xlsread readmatrix readcell : Excel (13) xlswrite: Excel (14) dlmread: *.txt (15) dlmwrite: *.txt
109 Python pip install numpy pip install scipy pip install opencv-python pip install matplotlib (1) : def (2) import time start_time = time.time() # end_time = time.time() total_time = end_time - start_time # 2021
110 (3) ( ) import cv2 image = cv2.imread(file_name) # color channel BGR cv2.imshow( test , image) # image cv2.imshow( test , image/255) cv2.waitKey(0) cv2.destroyAllWindows() cv2.imwrite(file_name, image) # color channel BGR ( ) import matplotlib.pyplot as plt image = plt.imread(file_name) # color channel RGB plt.imshow(image) # image plt.imshow(image/255) plt.show() plt.imsave(file_name, image) # color channel RGB
111 (4) array ( Matlab find ) import numpy as np a = np.array([0, 1, 2, 3, 4, 5]) index = np.where(a > 3) # array([4, 5]) print(index) (array([4, 5], dtype=int64),) index[0][0] 4 index[0][1] 5
112 1 2 3 4 6 5 A1= np.array([[1,3,6],[2,4,5]]) index = np.where(A1 > 3) print(index) (array([0, 1, 1], dtype=int64), array([2, 1, 2], dtype=int64)) ( A1 > 3 [0, 2], [1, 1], [1, 2] [index[0][0], index[1][0]] [0, 2] [index[0][1], index[1][1]] [1, 1] [index[0][2], index[1][2]] [1, 2] = A 1
113 (5) Hermitian transpose import numpy as np result = np.conj(matrix.T) # Hermitian result = matrix.T # transpose (6) Python Matlab mat data = scipy.io.loadmat('***.mat') y = np.array(data['y']) # y ***.mat































