I2C Communication for Low-Speed Peripherals
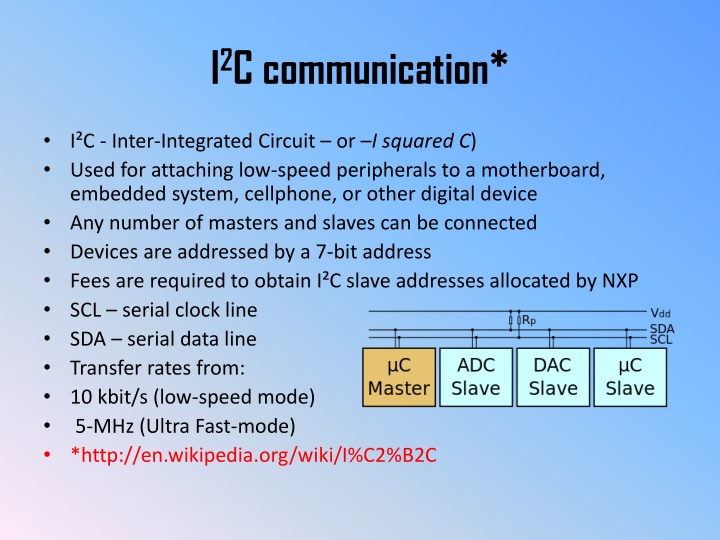
I2C, or Inter-Integrated Circuit, is utilized to attach low-speed peripherals to devices like motherboards, embedded systems, and cellphones. This communication protocol allows connecting multiple masters and slaves, which are addressed by a 7-bit address. Learn about accessing I2C pins and control code examples for HMC5883L compass module.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
I2C communication* I C - Inter-Integrated Circuit or I squared C) Used for attaching low-speed peripherals to a motherboard, embedded system, cellphone, or other digital device Any number of masters and slaves can be connected Devices are addressed by a 7-bit address Fees are required to obtain I C slave addresses allocated by NXP SCL serial clock line SDA serial data line Transfer rates from: 10 kbit/s (low-speed mode) 5-MHz (Ultra Fast-mode) *http://en.wikipedia.org/wiki/I%C2%B2C
I2C pins on the RPi GPIO Pin 3 Serial Data Line Pin 5 Serial Clock Line Pin 1 3.3V Pin 6 ground
To access I2C pins You MAY need to edit the following files: sudo nano /etc/modprobe.d/raspi-blacklist.conf Add a # character before the i2c line and save: #blacklist i2c-bcm2708 sudo nano /etc/modules Add these lines at the end of the file and save: i2c-dev i2c-bcm2708
I2C Code to control HMC5883L /* This code reads data from a Honeywell HMC 5883L 3-axis compass whether it is a standalone breakout board or part of an IMU. Data is read via I2C communications indefinitely. There are only minor adaptations of this code from one that was found on an on-line discussion board. Wes Lawson 4/20/2014 Initial version */ #include <stdio.h> #include <stdlib.h> #include <fcntl.h> #include <unistd.h> #include <string.h> #include <sys/ioctl.h> #include <sys/types.h> #include <sys/stat.h> #include <linux/i2c-dev.h> #include <math.h>
I2C Code to control HMC5883L const int HMC5883L_I2C_ADDR = 0x1E; void selectDevice(int fd, int addr, char * name) { if (ioctl(fd, I2C_SLAVE, addr) < 0) { fprintf(stderr, "%s not present\n", name); } } void writeToDevice(int fd, int reg, int val) { char buf[2]; buf[0]=reg; buf[1]=val; if (write(fd, buf, 2) != 2) { fprintf(stderr, "Can't write to HMC5883L\n"); } }
I2C Code to control HMC5883L int main(int argc, char **argv) { int fd; unsigned char buf[16]; if ((fd = open("/dev/i2c-1", O_RDWR)) < 0) { // Open port for reading and writing fprintf(stderr, "Failed to open i2c bus\n"); return 1; } /* initialize HMC5883L*/ selectDevice(fd, HMC5883L_I2C_ADDR, "HMC5883L"); writeToDevice(fd, 0x01, 32); writeToDevice(fd, 0x02, 0);
I2C Code to control HMC5883L while(1) { buf[0] = 0x03; if ((write(fd, buf, 1)) != 1) { fprintf(stderr, "Error writing to i2c slave\n"); // Send the register to read from } if (read(fd, buf, 6) != 6) { fprintf(stderr, "Unable to read from HMC5883L\n"); } else { short x = (buf[0] << 8) | buf[1]; short y = (buf[4] << 8) | buf[5]; short z = (buf[2] << 8) | buf[3]; float angle = atan2(y, x) * 180 / M_PI; printf("x=%d, y=%d, z=%d\n", x, y, z); printf("angle = %0.1f\n\n", angle); } usleep(500 * 1000); // wait 1/2 second } return 0; }