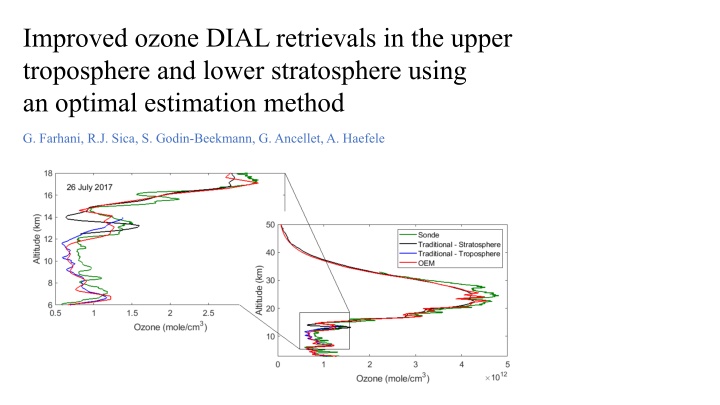
Improved ozone DIAL retrievals in the upper troposphere and lower stratosphere using an optimal estimation method
Enhance ozone DIAL retrievals in the upper troposphere and lower stratosphere through an optimal estimation method. The process involves the Bayesian theorem, forward models, measurement vectors, and more. Explore the application of the Optimal Estimation Method (OEM) in ozone retrieval, including forward modeling, Leveneberg-Marquart iteration, covariance analysis, and averaging kernels to determine the accuracy of measurements. Evaluate the performance of the model by comparing it to actual measurements and understanding the vertical resolution at different altitudes.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
Improved ozone DIAL retrievals in the upper troposphere and lower stratosphere using an optimal estimation method G. Farhani, R.J. Sica, S. Godin-Beekmann, G. Ancellet, A. Haefele
Optimal Estimation Method (OEM) The OEM is an inverse method based on the Bayesian theorem. Forward model: ? = ? ?,? + ? State vector ? = (?1,?2,?3, ,??) Vector of measurements ? = (?1,?2,?3, ,??) ? : forward model parameter ? : noise 2
Ozone DIAL Forward Model y = ? ?,? + ? y: vector of measurements ?(z) = F ?o3(z),?air(z), ,B, Ray, O3+ ? ? ?,?? =?(??) ? ? ? ??,? exp 2? ?,?? + ? ? ?2 ? = (?o3(z),?air(z), ,B z ) ? = ( Ray, O3) 3
OEM in brief Forward model y = ? ?,? + ? ??? 1? ? ?,? ??? 1 ? ?? ? ? = ? ? ?,? + ? ?? Cost Leveneberg- Marquart iteration 1 ????? ??? 1+ ?? 1 1?? ?? ) ??+1 = ??+ 1 + ???? ?? ? ?(?? ?? Total ??????= ??+ ??+ ?? Covariance 4
Averaging Kernel: The averaging kernel shows the sensitivity of the true state to the retrieved state: A = ? ? ?? For an ideal retrieval: the AK is a unit matrix: ? = ? ? x?+ ?? + ?? Unity matrix True state a priori profile Retrieval uncertainty Averaging Kernel for 12 July 2017 Sum of each row 5
Retrieved ozone profiles for 12 July 2017: - - - - The tropospheric lidar operated from 20:49 to 23:57 (local time). The stratospheric lidar operated from21:06 to 01:42 (local time). An ozonesonde was launched at 21:53 from the OHP station. The tropopause height was at 14.7 km. 6
How do we know if the forward model is good? The percentage difference between the forward model and the measurements is within the measurement's noise. ? ? ?,? (noise of measurements)
At an altitude of 2.5 km, the vertical resolution for the OEM retrieval is 150 m, increasing to 300 m at 11 km. The traditional vertical resolution starts at 150 m as well, but is designed to grow faster such that at 11 km the vertical resolution is 1000 m. At 11 km where the stratospheric measurements are added, the OEM vertical resolution is 300 m and gradually increases up to 600 m at 14.5 km. The traditional method at 11 km has the vertical resolution of 150 m and at 14.5 km has the same value as the OEM. The uncertainty of the retrieval in the traditional method is smaller, so that at 11 km it is 4.5% as opposed to the OEM retrieval, which has a larger uncertainty of 7.5%.
Conclusion 1. The forward model uses the lidar equation and works directly with the raw measurements. The forward model provides a robust estimate of ozone profiles for clear nights. 2. The combined stratospheric tropospheric DIAL OEM retrieval calculates a single ozone profile consistent with all the measurements. 3. We used four different channels for tropospheric ozone retrievals, and eight different channels for the stratospheric tropospheric ozone retrievals. The OEM has the advantage of using all these measurements at the raw (Level 0) stage; thus, no gluing or merging of profiles is needed. 4. In the UTLS, the OEM retrieval smoothly transitions from one lidar system to the other system. The vertical resolution of the OEM retrievals in this region is about 600 m, and the retrieval uncertainty due to measurement noise does not exceed 7%. Future work: implement the method for decades of data Codes are available at: https://github.com/gfarhani/OEM_stratospheric_ozone
??????,??? =? ??? ? ???,? ?3???,? ??? ???,? + ????? ?2 ??????,???? =? ???? ? ????,? ?3????,? ??? ????,? + ????? ?2 ?3,??? ??,? = exp( 2??3,???) 11

")