Matrix Classes & Solvers Complexity
Explore the complexity of direct methods and linear solvers for solving problems on finite element meshes, as well as the hierarchy of matrix classes. Discover the Laplacian matrix, edge-vertex factorization, and graph preconditioning methods in this informative content.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author. If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
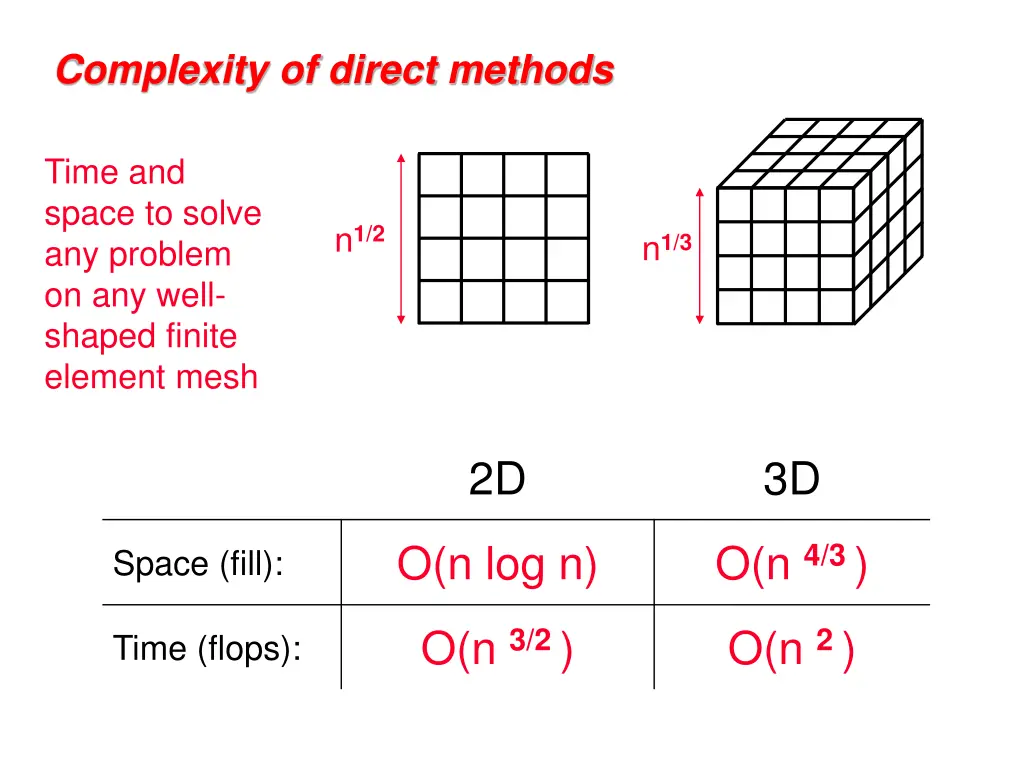
Complexity of direct methods Time and space to solve any problem on any well- shaped finite element mesh n1/2 n1/3 2D 3D O(n log n) O(n 4/3 ) Space (fill): O(n 3/2 ) O(n 2 ) Time (flops):
Complexity of linear solvers Time to solve model problem (Poisson s equation) on regular mesh n1/2 n1/3 2D O(n3 ) O(n1.5 ) 3D O(n3 ) O(n2 ) Dense Cholesky: Sparse Cholesky: CG, exact arithmetic: CG, no precond: CG, modified IC0: Support theory: Multigrid: O(n2 ) O(n1.5 ) O(n1.25 ) O~(n) O(n) O(n2 ) O(n1.33 ) O(n1.17 ) O~(n) O(n)
Hierarchy of matrix classes (all real) General nonsymmetric Diagonalizable Normal Symmetric indefinite Symmetric positive (semi)definite = Factor width n Factor width k . . . Factor width 4 Factor width 3 Symmetric diagonally dominant = Factor width 2 Generalized Laplacian = Symmetric diagonally dominant M-matrix Graph Laplacian
Definitions The Laplacian matrix of an n-vertex undirected graph G is the n-by-n symmetric matrix A with aij = -1 if i j and (i, j) is an edge of G aij = 0 if i j and (i, j) is not an edge of G aii = the number of edges incident on vertex i Theorem: The Laplacian matrix of G is symmetric, singular, and positive semidefinite. The multiplicity of 0 as an eigenvalue is equal to the number of connected components of G. A generalized Laplacian matrix (more accurately, a symmetric weakly diagonally dominant M-matrix) is an n-by-n symmetric matrix A with aij 0 if i j aii |aij| where the sum is over j i
Edge-vertex factorization of generalized Laplacians A generalized Laplacian matrix A can be factored as A = UUT, where U has: a row for each vertex a column for each edge, with two nonzeros of equal magnitude and opposite sign a column for each excess-weight vertex, with one nonzero vertices vertices A = U UT vertices edges (2 nzs/col) excess- weight vertices (1 nz/col) vertices
Support Graph Preconditioning CFIM: Complete factorization of incomplete matrix Define a preconditioner B for matrix A Explicitly compute the factorization B = LU Choose nonzero structure of B to make factoring cheap (using combinatorial tools from direct methods) Prove bounds on condition number using both algebraic and combinatorial tools +: New analytic tools, some new preconditioners +: Can use existing direct-methods software -: Current theory and techniques limited
Spanning Tree Preconditioner [Vaidya] G(A) G(B) A is generalized Laplacian (symmetric diagonally dominant with negative off-diagonal nzs) B is the gen Laplacian of a maximum-weight spanning tree for A (with diagonal modified to preserve row sums) Form B: costs O(n log n) or less time (graph algorithms for MST) Factorize B = RTR: costs O(n) space and O(n) time (sparse Cholesky) Apply B-1: costs O(n) time per iteration
Combinatorial analysis: cost of preconditioning G(A) G(B) A is generalized Laplacian (symmetric diagonally dominant with negative off-diagonal nzs) B is the gen Laplacian of a maximum-weight spanning tree for A (with diagonal modified to preserve row sums) Form B: costs O(n log n) time or less (graph algorithms for MST) Factorize B = RTR: costs O(n) space and O(n) time (sparse Cholesky) Apply B-1: costs O(n) time per iteration (two triangular solves)
Numerical analysis: quality of preconditioner G(A) G(B) support each edge of A by a path in B dilation(A edge) = length of supporting path in B congestion(B edge) = # of supported A edges p = max congestion, q = max dilation condition number (B-1A) bounded by p q (at most O(n2))
Spanning Tree Preconditioner [Vaidya] G(A) G(B) can improve congestion and dilation by adding a few strategically chosen edges to B cost of factor+solve is O(n1.75), or O(n1.2) if A is planar in experiments by Chen & Toledo, often better than drop-tolerance MIC for 2D problems, but not for 3D.
Numerical analysis: Support numbers Intuition from networks of electrical resistors: graph = circuit; edge = resistor; weight = 1/resistance = conductance How much must you amplify B to provide as much conductance as A? How big does t need to be for tB A to be positive semidefinite? What is the largest eigenvalue of B-1A ? The support of B for A is (A, B) = min { : xT(tB A)x 0 for all x and all t } If A and B are SPD then (A, B) = max{ : Ax = Bx} = max(A, B) Theorem: If A and B are SPD then (B-1A) = (A, B) (B, A)
Edge-vertex factorization of generalized Laplacians A generalized Laplacian matrix A can be factored as A = UUT, where U has: a row for each vertex a column for each edge, with two nonzeros of equal magnitude and opposite sign a column for each excess-weight vertex, with one nonzero vertices vertices A = U UT vertices edges (2 nzs/col) excess- weight vertices (1 nz/col) vertices
Algebraic Embedding Lemma [Boman/Hendrickson] Lemma: If V W=U, then (U UT, V VT) ||W||22 (with equality for some choice of W) Proof: take t ||W||22 = max(W WT) = max y 0 { yTW WTy / yTy } then yT (tI - W WT) y 0 for all y letting y = VTx gives xT (tV VT - U UT) x 0 for all x recall (A, B) = min{ : xT(tB A)x 0 for all x, all t } thus (U UT, V VT) ||W||22
-a2 -c2 -a2 -b2 -b2 [ ] [ ] a2 +b2-a2 -b2 -a2 a2 +c2 -c2 -b2 -c2 b2 +c2 a2 +b2-a2 -b2 -a2 a2 -b2 =VVT b2 B =UUT A -b-c[ ] U ] [ ab -a c ab -a c -b V
-a2 -c2 -a2 -b2 -b2 [ ] [ ] a2 +b2-a2 -b2 -a2 a2 +c2 -c2 -b2 -c2 b2 +c2 a2 +b2-a2 -b2 -a2 a2 -b2 =VVT [ b2 B =UUT A -b-c[ ] U ] [ ] ab -a c ab -a c 1-c/a 1 c/b/b B edges x = -b A edges V W
-a2 -c2 -a2 -b2 -b2 [ ] [ ] a2 +b2-a2 -b2 -a2 a2 +c2 -c2 -b2 -c2 b2 +c2 a2 +b2-a2 -b2 -a2 a2 -b2 =VVT [ b2 B =UUT A -b-c[ ] U ] [ ] ab -a c ab -a c 1-c/a 1 c/b/b B edges x = -b A edges V W (A, B) ||W||22 ||W|| x ||W||1 = (max row sum) x (max col sum) (max congestion) x (max dilation)
Extensions, remarks, open problems I Using another matrix norm inequality [Boman]: ||W||22 ||W||F 2= sum(wij2) = sum of (weighted) dilations, and [Alon, Karp, Peleg, West] construct spanning trees with average weighted dilation exp(O((log n loglog n)1/2)) = o(n ). This gives condition number O(n1+ ) and solution time O(n1.5+ ), compared to Vaidya s O(n1.75) with augmented MST. Is there a graph construction that minimizes ||W||22directly? [Spielman, Teng]: complicated recursive partitioning construction with solution time O(n1+ ) for all generalized Laplacians! (Uses yet another matrix norm inequality.)
Extensions, remarks, open problems II Support theory methods for more general matrices? [Boman, Chen, Hendrickson, Toledo]: different matroid for all symmetric diagonally dominant matrices (= factor width 2). Matrices of bounded factor width? Factor width 3? All SPD matrices? Is there a version that s useful in practice? Especially for non-geometric graph Laplacians? [Koutis, Miller, Peng 2010] simplifies Spielman/Teng a lot. [Kelner et al. 2013] : random Kaczmarz projections in the dual space even simpler, good O() theorems, but not yet fast enough in practice. Lots of current work.
Support-graph analysis of modified incomplete Cholesky -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 .5 .5 .5 -1 -1 -1 -1 -1 -1 B A -1 -1 -1 -1 -1 -1 -1 -1 .5 .5 .5 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 .5 .5 .5 -1 -1 -1 -1 -1 -1 A = 2D model Poisson problem B = MIC preconditioner for A B has positive (dotted) edges that cancel fill B has same row sums as A Strategy: Use the negative edges of B to support both the negative edges of A and the positive edges of B.
Supporting positive edges of B Every dotted (positive) edge in B is supported by two paths in B Each solid edge of B supports one or two dotted edges Tune fractions to support each dotted edge exactly 1/(2 n 2) of each solid edge is left over to support an edge of A
Analysis of MIC: Summary Each edge of A is supported by the leftover 1/(2 n 2) fraction of the same edge of B. Therefore (A, B) 2 n 2 Easy to show (B, A) 1 For this 2D model problem, condition number is O(n1/2) Similar argument in 3D gives condition number O(n1/3) or O(n2/3) (depending on boundary conditions)


")

















