Neural Network Optimizations & Safe Landing Site Detection Problem

This content delves into optimizing neural networks for safe landing site detection, covering topics such as required training repetitions, optimal hidden layers/nodes selection, and objective function minimization using gradient descent techniques. It also discusses Gradient Descent Optimizations and a Vision-Based Automatic Safe Landing-Site Detection System's key aspects like elevation and landform considerations.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
Neural Network Optimizations & Safe Landing Site Detection Problem David Glowny
Number of required training repetitions The lowest error ... is analogous to the strength of the weakest link (Iyer and Rhinehart) ??(? ??(?)) ??(? ??? ) ? = ? ??? = 1 1 ??? ? ??? = ??(?) 0 N = number of random starts (repetitions with random starting weights) x = error value, a = target error value ??(?) is the CDF of a ??(?) is the CDF of weakest link 99% confidence: ??? = 0.99 ??? = 0.2 means X-value for sum-of-squared errors is best (lowest) 20% possible values 2
Find optimal hidden layers/nodes Cross validation Split training data into k folds (equal-sized parts) For each iteration, choose number of hidden layers/nodes For each iteration, train the network k times using k-1 folds as training data and the k-th one as testing data Choose parameters with lowest testing error ? ???=1 ? ?=1 ??(?) ??? = ?? ?? ??? ????????? ? 3
Minimize objective function using gradient descent Batch ( Vanilla ) Gradient Descent computes the gradient of the cost function for the entire training dataset Stochastic Gradient Descent Performs parameter update for each training example (??) & training label (??) Mini-Batch Gradient Descent Performs an update for every mini-batch of n training examples 4
Gradient Descent Optimizations Momentum accelerate SGD in the relevant direction and dampens oscillations Adagrad Adapts the learning rate to the parameters performs larger updates for infrequent parameters performs smaller updates for frequent parameters 5
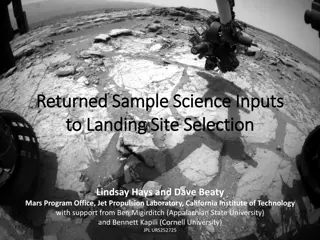
A Vision-Based Automatic Safe Landing-Site Detection System (Shen, Rahman, Krusienski, & Li) Focuses on detection mechanism and assume the image enhancement has already been performed on terrain images acquired by aircraft-mounted cameras Test data for terrain classification made by two veteran professional pilots (However, this data is not publicly available) Allows pilot to make final decision Concepts taken into consideration for evaluation: Elevation Landform Dimensions of landing-site 6
Basic implementation of landing-site detection system Implementation: Block-wise roughness assessment (measured by gradient of elevation) Hierarchical elastic horizon detection algorithm Canny edge detector Cumulative hazard strength (CHS) of each block 7
Image processing follows: horizon detection, rough assessment via edge detector, k-means clustering Horizon is marked via a hierarchical elastic horizon detection algorithm Efficiency of the detection system is improved by Canny edge detector Classification and segmentation is conducted via K- means clustering method 8
Classification (via k-means clustering) and scoring of results Classification: K-means clustering (7 clusters) for CHS of each block very rough rough moderate rough median moderate smooth smooth very smooth Scoring mechanism S consists of 3 parts bonuses ?? for TP detections Penalties ?? for FP detections base score ?0 ?? = flag indicating if jth detected area is an FP detection ?? = flag that indicates if the ith largest area in the ground-truth was successfully detected by the system p = penalty b = bonus weight 9
Example results from image analysis Example of classifying top candidates for safe landing sites Landing sites sorted in descending order based on their areas Top 5 results will be presented to pilot to evaluate 10
Conclusions about A Vision-Based Automatic Safe Landing-Site Detection System Pros Does not rely on high resolution imagery or LiDAR data (more accessible for aircraft) Both elevation and landform are taken into consideration Filters results to those with greatest size Cons: Other factors of maneuverability, such as wind, have to be manually considered by pilot Limitations in terrain detail (i.e. lack of LiDAR data) 11
3D Convolutional Neural Networks for Landing Zone Detection from LiDAR (Maturana & Scherer) Couples a volumetric occupancy map with a 3D Convolutional Neural Network (CNN) Method applied to autonomous helicopters 12
Structure of 3D Convolutional Neural Network for Classifying Landing Sites CNN model consists of multiple layers: Input layer which used point cloud data to form scaled and centered 3D tensors 1-2 convolution layers that computes feature maps (2nd convolution layer is pooling layer) Dense layer Output layer gives posterior probability computed as a logistic regression layer 13
Conclusions about 3D Convolutional Neural Networks for Landing Zone Detection from LiDAR Pros: Detailed vegetation terrain analysis System outperforms various baselines, despite training on raw data LiDAR is currently being researched for planes (in addition to helicopters) Example: Boeing is testing LiDAR with Boeing 777 for detecting turbulance Cons: Some false classification with similar structured rocks/vegetation Reliance on extracting LiDAR data Requires highly expensive equipment that may not be easily applied to small aircraft 14








 and")