Robot Calibration and Geometric Parameters: Errors and Solutions
Learn about the errors in robot geometric parameters due to machining and assembling errors and the solutions involving calibration using accurate measuring machines. Explore examples of error calculations and matrix forms to improve accuracy. Understand the linearization process and calibration of Denavit-Hartenberg parameters to enhance robot performance.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author. If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
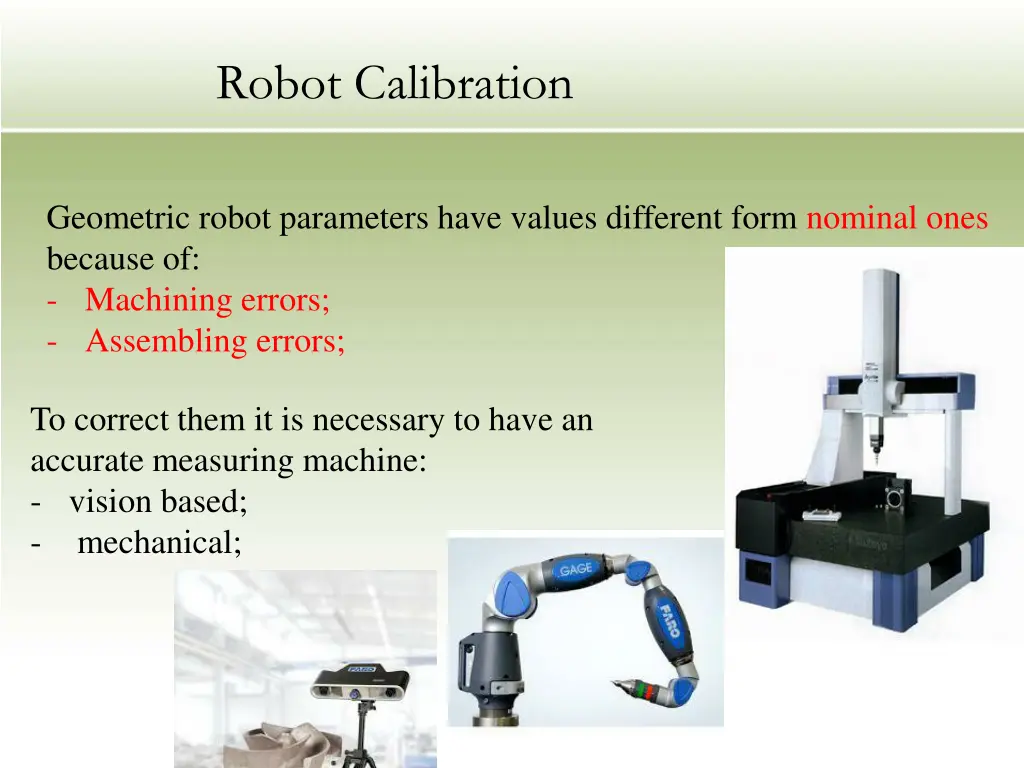
Robot Calibration Geometric robot parameters have values different form nominal ones because of: - Machining errors; - Assembling errors; To correct them it is necessary to have an accurate measuring machine: - vision based; - mechanical;
Errors: accuracy and repetibility Calibration can improve accuracy, not repeatibility
2 DoF example Error = Misured pose nominal pose q2 Let s assume that the lengths of the links are affected by errors l1 and l2 ??? ?1 ??? ?1 q1 ??? ?1 + ?2 ??? ?1 + ?2 ?? ??= ?1 + ?1 + ?2 + ?2 ? =
In matrix form ?? ??= ?1??? ?1 +?2??? ?1 + ?2 ??? ?1 + ?2 +??? ?1 ??? ?1 ??? ?1 + ?2 ??? ?1 + ?2 ?1 ?2 ??? ?1 unknowns Nominal pose (Pn) A Measured pose (Pm) Results of calibration ? = ? 1?? ??
In case we have more measured points (n points) ??1 ??1 = ?1 ? ??2 ??2 = ?2 ? ??1 ??1 ??? ??? ?1 ?? = ? ??? ??? = ?? ? ? = ? is not squared: 2xn rows 2 columns Using the pseudoinverse of This solution minimizes the error ? ? = ? ? ?= ? 1 ? ? ? = ? ?
Lets assume an error on the encoder ??? ?1 + ?1 ??? ?1 + ?1 ??? ?1 + ?1 + ?2 + ?2 ??? ?1 + ?1 + ?2 + ?2 ?? ??= ?1 + ?1 + ?2 + ?2 ? = Since the relationship between measured pose and unknowns parameters is not linear, it is necessary to linearize ?1 ?2 ?1 ?2 ?? = ?1??? ?1 +?2??? ?1 + ?2 ??? ?1 + ?2 where Pm ?? +?? ??? ?1 ? ?? ? = ??? ?1 ??? ?1 ??? ?1 + ?2 ??? ?1 + ?2 ?1 sin ?1 ?1 cos ?1 + ?2( sin(?1 + ?2)) + ?2(???(?1 + ?2)) ?2( sin(?1 + ?2)) ?2(???(?1 + ?2)) For each pose we can write ?? =?? where ?? = ??? ??? ? ? ?
Combining all the poses ?? ?1 ?? ? 1 ?? = ? ? = ? ? ? Using the pseudoinverse of ? ? = ? ? ?= ? 1 ? ?
Calibration of The Denavit-Hartenberg parameters Consider the direct kinematics equation in which he pose can be rewritten by emphasizing the dependence of the operational space variables on the fixed DH parameters Linearization Measured pose nominal pose Combining all the pose All the D-H parameters Solution
Robot-Base Calibration ?=? ?0 0?7 The robot is calibrated ?0= ?7 ?on the base, The tool is moved to a pose ?? which is known with respect to the base frame The equation that we can write is ?= ?0 ??7 0?7 ?? ? The unknowns are the parameters of the matrix ?0 If we consider more points it is possible to solve the problem
Exercise: calirbation of a 2DoF robot, introducing a random error x,y q2 l q1