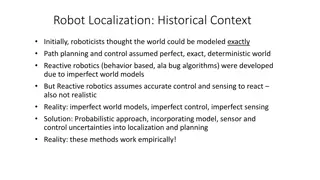
Robot Localization with Particle Filters: Implementation and Algorithms
Explore the world of robot localization using particle filters, Bayes filtering, and Markov localization techniques. Understand concepts like Monte Carlo localization, adaptive Monte Carlo (AMCL), and the idea behind particle filters representing beliefs with random samples. Dive into algorithms like importance weighting, resampling, and the use of sensor information for accurate localization.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author. If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
Particle filters for Robot Localization An implementation of Bayes Filtering Markov Localization
Monte Carlo Localization Repeated Random Sampling
Particle Filters Idea: Represent belief by random samples Estimation of non-Gaussian, nonlinear processes Monte Carlo filter, Survival of the fittest, Condensation, Bootstrap filter, Particle filter
MC Localization Start with lots of random samples (aka particles) Weight each with probability based on sensor reading.
MC Localization Given an action a, Use importance weighting to select from the old particles Probabilistically create new particle given action and motion model
Adaptive Monte Carlo Localization often abbreviated AMCL
Sensor Information: Importance Sampling ( ) ( | ) ( ) Bel x p z x Bel x ( | ) ( ) p z x Bel x = ( | ) w p z x ( ) Bel x
Robot Motion ( ) ( | ) ' x ( ) ' x d ' Bel x p x u Bel x ,
Sensor Information: Importance Sampling ( ) ( | ) ( ) Bel x p z x Bel x ( | ) ( ) p z x Bel x = ( | ) w p z x ( ) Bel x
Robot Motion ( ) ( | ) ' x ( ) ' x d ' Bel x p x u Bel x ,
Particle Filter Algorithm Sample the next generation for particles using the proposal distribution Compute the importance weights : weight = target distribution / proposal distribution Resampling: "Replace unlikely samples by more likely ones"
Particle Filter Algorithm 1. Algorithm particle_filter( St-1, ut-1 zt): 2. 0 , = = = tS Generate new samples 3. For 1 i n 4. Sample index j(i) from the discrete distribution given by wt-1 Sample from using and ) , | ( 1 1 t t t u x x p w = 5. tu ( ) i j i tx tx 1 1 Compute importance weight 6. z i t i t ( | ) p x t = + 7. Update normalization factor i t w w Insert 8. = i t i t { , } S S x t t 9. For = 1 i n Normalize weights 10. / w = i t i t w
Particle Filter Algorithm = ( ) ( | ) ( | , ) ( ) Bel x p z x p x x u Bel x dx 1 1 1 1 t t t t t t t t draw xit 1from Bel(xt 1) draw xitfrom p(xt | xit 1,ut 1) Importance factor for xit: target i t w = distributi on proposal p distributi p x on x ( | ) ( | , Bel ) ( ) z x u Bel x = 1 1 1 t t t t t t ( | , ) ( ) p x x u x 1 1 1 t t t t ( | ) p z x t t
Resampling Given: Set S of weighted samples. Wanted : Random sample, where the probability of drawing xi is given by wi. Typically done n times with replacement to generate new sample set S .
Resampling w1 wn w1 wn w2 w2 Wn-1 Wn-1 w3 w3 Stochastic universal sampling Systematic resampling Linear time complexity Easy to implement, low variance Roulette wheel Binary search, n log n
Resampling Algorithm 1. Algorithm systematic_resampling(S,n): = = 2 2. 3. For 4. 5. u 1 ' , S c = w 1 Generate cdf i n w ], = , 0 ] U + 1 i c ~ c 1 n i i = Initialize threshold 1 i 1 = 1 j n 6. For 7. 8. 9. 10. Increment threshold 1 n u u j j Draw samples Skip until next threshold reached u 1 c While ( ) + = j i =i + i 1 = ' i ' , S S x n Insert 1 + 11. ReturnS Also called stochastic universal sampling
Motion Model Reminder Start
Proximity Sensor Model Reminder Sonar sensor Laser sensor
After Incorporating Ten Ultrasound Scans 38
After Incorporating 65 Ultrasound Scans 39
Mobile Robot Localization Each particle is a potential pose of the robot Proposal distribution is the motion model of the robot (prediction step) The observation model is used to compute the importance weight (correction step)



































")