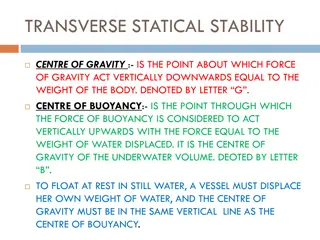
Ship Response and Motion Modeling
Discover the intricate dynamics of ship response modeling, encounter frequencies, and motion generation in different sea conditions. Explore the complexities of spring-mass-damping systems, encounter frequencies, and the influence of wave direction on ship behavior. Unveil the nuances of ship motion encompassing six degrees of freedom and the interplay of translational and rotational motions. Delve into the fascinating realm of heave and pitch generation, understanding the mechanisms behind restoring forces and damping effects.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author. If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
Ship Response Sections 8.4 8.5
Ship Response Modeling Spring-Mass-Damping Fcos(??) K C: damping coefficient C spring damper Modeling: mass Heave of Ship Fcos(???) Exciting force due to wave at time (t) F = force of the wave damping 2? ?? ??= ???? ????????? = Additional Buoyancy Force ?? = ????? ??= ???? ?????? (???)
Encounter Frequency (??) Motion created by exciting force in the spring-mass-damper system is dependent on the magnitude of exciting force (F) and frequency (?). Motion of ship due to its excitation in waves is the same as one of the spring-mass-damper system. Encounter Frequency (??) of this exciting force on the ship is dependent on wave frequency, ship speed, and ship s heading. A change in any 3 of these parameters will change the encounter frequency a ship is experiencing and therefore change the ship s response motion
Encounter Frequency (??) Wave Direction V Crest V Ship Heading V V ?? = encounter frequency ??= wave frequency V = Ship s speed (?? ?= Ship s heading angle relative to wave direction g = acceleration due to gravity (?? 2 ? ???(?) ? ??= ?? ?? ?) ?2) On Equation Sheet (Ch. 8)
Encounter Frequency (??) Conditions Head Sea: A ship heading directly into the waves will meet the successive waves much more quickly and the waves will appear to be a much shorter period. Following Sea: A ship moving in a following sea, the waves will appear to have a longer period. Beam Sea: If wave approaches a moving ship from the broadside there will be no difference between wave period and apparent period experienced by the ship
Ship Response 6 Degrees of Freedom pitch heave surge roll sway yaw Translational Motion: Surge, Sway, Heave Rotational Motion: Roll, Pitch, Yaw Simple Harmonic Motion: Heave, Pitch and Roll
Ship Response Motion - Heave Generation of restoring force in Heave Experience large damping effect. < ?? > ?? = ?? Zero Resultant Force Resultant Force G DWL G z z G DWL B B B Resultant Force CL CL CL
Ship Response Motion - Pitch Generation of restoring force in Pitch Pitch motions are quickly damped out since large waves are generated due to pitching. S G B F B S G B F B
Ship Response Motion - Roll Generation of restoring force in Roll Creation of Righting Arm Internal Righting Moment (RM) from Chapter 4! Roll motions are slowly damped out because small wave systems are generated due to roll s Z B FB
Ship Response Motion - Roll Stiff GZ curve; large GM Tender GZ curve; small GM Angle of heel (degree) Large GM Steep initial slope Stiff ship very stable (good stability) Small period ; bad sea keeping quality Small GM shallow initial slope tender ship less stable Large period ; good sea keeping quality
Resonance of Simple Harmonic Motion Roll Heave Pitch Resonance of ship: Encounter frequency ??= Natural frequency (??) Generally, Heave & Pitch are well damped due to large wave generation. But, Roll amplitudes are very susceptible to encounter frequency resonance Also, roll motions are not damped well due to wave motion Resonance is more likely to occur with roll than pitch & heave. Thus anti-rolling devices are necessary.
Ship Response Reduction Passive Anti-Rolling Device Bilge Keel Very common passive anti-rolling device Located at the bilge turn Reduce roll amplitude up to 35 %. Bilge Keel Tank Stabilizer (Anti-rolling Tank) Reduce the roll motion by throttling the fluid in the tank. Relative change of G of fluid will dampen the roll. U-typeTube Throttling
Ship Response Reduction Active Anti-Rolling Device Fin Stabilizer Very common active anti-rolling device Located at the bilge keel. Controls the roll by creating lifting force Roll Moment Lift Anti-roll Moment
Ship Response Reduction Active Anti-Rolling Device Fin Stabilizer
Ship Response Reduction Ship Operation ?? = encounter frequency ??= wave frequency V = Ship s speed (?? 2 ? ???(?) ? ??= ?? ?? ?) ?= Ship s heading angle relative to wave direction g = acceleration due to gravity (?? On Equation Sheet (Ch. 8) ?2) *** Ship response can be reduced by altering the: ship speed heading angle or both WOW! This is what you will do as OOD!
Fleet Connection Seakeeping Operating Envelopes (SOEs)
Example Problem A ship is moving at a speed 20 kts and headed south east (heading angle = 120 degrees), waves are from north to south with a period of 12 seconds. What is the encounter frequency currently of the ship? Wave frequency : N 120 Encountering angle: Encountering freq.: V=20kts S
Example Problem You are OOD on DD963 independent steaming in the center of your assigned water space during supper. You are doing 10kts on course 330 T and the waves are from 060 T with a period of 9.5 sec. The Captain calls up and orders you to reduce the Ship s motion during the meal. Your JOOD proposes a change to course 060 T at 12 kts. Do you agree with them and why/why not? The natural frequencies for the ship follows: roll = 0.66 rad/s longbend = 0.74 rad/s pitch = 0.93 rad/s torsion = 1.13 rad/s heave = 0.97 rad/s
Example Answer Your current condition: w= 2 /T = 2 /9.5 sec = .66 rad/s Waves are traveling 060 T + 180 = 240 T e = w - ( w Vcos ) / g = .66 rad/s ((.66rad/s) (10 kt 1.688 ft/s-kt) cos(330 - 240 )) / (32.17 ft/s ) = .66 rad/s = roll Encounter frequency is at roll resonance with seas from the beam - bad choice
Example Answer JOOD proposal: e = w - ( w Vcos ) / g = .66 rad/s ((.66 rad/s) (12 kt 1.688 ft/s-kt) cos(060 - 240 )) / (32.17 ft/s ) = .93 rad/s = p Encounter frequency is at pitch resonance with seas from the bow - another bad choice. Do not take JOOD recommendation. Try 060 at 7kts: e = w - ( w Vcos ) / g = .66 rad/s ((.66r ad/s) (7kt 1.688 ft/s-kt) cos(060 -240 )) / (32.17ft/s ) = .82 rad/s This avoids the resonant frequencies for the ship - Good Choice


")
")
 Conditions")