Understanding Robot Control and Equipment
Explore the diverse world of robots, from their definitions and components to programming and software requirements. Learn about inputs/outputs, software configurations, and get answers to common questions about robotics.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author. If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
How to Control a Robot Presenter: Danny McCrea Advisor: Dr. Jong-Hoon Kim
What is a Robot? Human Being Perseverance Rover Robot Vacuums Surgery Pharmacy Manufacturing
What Defines a robot? Inputs-Start/Stop Outputs Communication Software Automated Operation
Inputs/Outputs Vex Micro-Controller Programmable Controller Logic Digital or Analog Line Followers(3) Capacitive, Inductive, or Camera 0-10v equates to 0-32767 in a 16bit processor Calibrate/Scaling Example: 0-120 mph 120/32767= resolution Resolution data
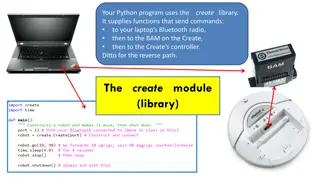
Software Cortex C++ Transmit information-Communication Devicenet, Controlnet, or EthernetIP HMI Output devices-Motors and servos Feedback devices-resolvers and encoders Calibration Mode Safety Monitoring-receiving information from a sensor