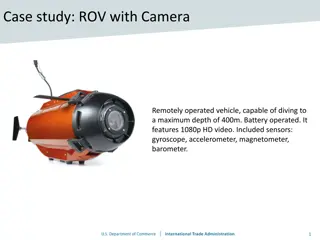
Underwater Remotely Operated Vehicle Control Interface
This project details the development of a secondary control unit for an Underwater Remotely Operated Vehicle (ROV). The objective was to enhance control capabilities by providing space for essential modules, enabling rapid movement, and reducing the primary driver's workload. The design, functions, and future utilization of the control interface are discussed, highlighting the team's progress towards creating a fully functional system for the MATE competition. Acknowledgements to mentors and contributors are also included.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
Secondary Control Interface for Underwater Remotely Operated Vehicle Brittany Nez Key Acknowledgements: Ryan Meuth, Joseph Mattern Sheraton Phoenix Airport Hotel April 18, 2015
A Brief Summary NASA Space Grant Robotics will participate in international MATE competition Team was in need of a secondary control unit for extra module space
Initial System Complications Access to necessary controls and modules limited Small motor control variability on initial control system Single interface placed all control on one single team member
Project Objective Create a secondary control unit that would: Provide necessary space for essential modules Allow for rapid- position movement of robot Reduce Primary Driver Workload
Component Functions Data Display General Controls Navigation System Camera Controls Variable Motor Controls
Design and Progress Design process and control programming complete Testing will take place in near future Control system should be fully functional and tested by MATE competition
Future Utilization Additional console has given team option to enhance robot with more components MATE Tasks and Missions are altered every year Control interface is easily modified Can be used for subsequent ROVs
Acknowledgements Ryan Meuth (Mentor) Joseph Mattern ASU/ NASA Space Grant NASA Space Grant Robotics THANK YOU