Drive Train Design for Robotics Competition
Explore the journey of designing and testing drive trains for robotics competition, from concept to prototype. Learn about meeting strategy goals, building for durability, and understanding motor capabilities. Discover various drive train types and testing methodologies to optimize robot performance.

Download Presentation

Please find below an Image/Link to download the presentation.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author. If you encounter any issues during the download, it is possible that the publisher has removed the file from their server.
You are allowed to download the files provided on this website for personal or commercial use, subject to the condition that they are used lawfully. All files are the property of their respective owners.
The content on the website is provided AS IS for your information and personal use only. It may not be sold, licensed, or shared on other websites without obtaining consent from the author.
E N D
Presentation Transcript
1 Robots from concept to competition September 21, 2015
FIRST Tech Challenge Drive Train Testing 2 By Techno Warriors Advanced FTC #3486 October 15, 2015
Topics 3 Project Description Requirements Basics Drive Train Design Drive Train Types Testing Science/Engineering Conclusions October 15, 2015
Project Description 4 Built and tested seven drive train designs Simulated FTC match environments Tested each design with added weight to mimic various robot weights Compiled and analyzed data to find ideal configurations for each test October 15, 2015
Requirements 5 Meets strategy goals for the game Is built from available resources Time Cost Tools for fabrication Part 1 of game manual Rarely needs maintenance Is repairable within 4 minutes Uses minimal amount of space October 15, 2015
Basics Drive Train Design 6 Decide strategy after kickoff Speed Power Mobility Decide how many motors will be allotted for drive train Decide robot weight Traction Mobility Speed Offensive/Defensive ability October 15, 2015
Basics Drive Train Design 7 Build for durability and test Find weak points Practice driving Have spare parts and assemblies Develop a project plan Allot time for development and building Learn technology Know motor capabilities and limitations Know electrical capabilities and limitations October 15, 2015
Basics Drive Train Design 8 Build for durability and test Find weak points Practice driving Have spare parts and assemblies Develop a project plan Allot time for development and building Learn technology Know motor capabilities and limitations Know electrical capabilities and limitations October 15, 2015
Nimble: 2 wheel drive + 2 Omni caster wheels 9 Motor Motor Driven wheels Omni caster wheels This drive train uses two direct drive 4 wheels with two 3 omni caster wheels. This robot has a base weight of 7 lbs due to its 10 x18 80/20 frame. October 15, 2015
Nimble: 2 wheel drive + 2 Omni caster wheels 10 Motor Motor Driven Wheels Motor Motor This drive train uses four direct drive 4 wheels that are not connected to each other. This robot has a base weight of 7 lbs due to its 10 x18 80/20 frame. October 15, 2015
Unity: 4 wheel drive, connected 11 Motor Motor Driven Wheels Chain Motor Motor This drive train uses four direct drive 4 wheels that are connected to each other using chain (not drawn in Creo). This robot has a base weight of 9 lbs due to its 10 x18 80/20 frame plus added chain and sprockets. October 15, 2015
Robust: 10 wheel drives 12 Motor Motor Gears Gears Motor Motor This drive train uses 10 chain driven 3 wheels that are geared together with the 4 outer wheels raised. This robot was our competition robot from the 2014- 2015 season which weighed 55 lbs. October 15, 2015
Whirlwind: 6 wheel drive, 2 tread types 13 Motor Motor Motor Motor This drive train uses 6 chain driven 4 wheels with the outer wheels being the AndyMark omni wheels and the inner wheels using either the AndyMark Performance Tread or the AndyMark Wedgetop Tread (tested separately). This robot had a base weight of 22.5 lbs. October 15, 2015
Tracks: Track drive, 4 motors 14 Motor Motor Motor Motor This drive train uses 6 chain driven 4 wheels with the outer wheels being the AndyMark omni wheels and the inner wheels using either the AndyMark Performance Tread or the AndyMark Wedgetop Tread (tested separately). This robot had a base weight of 22.5 lbs. October 15, 2015
Direction: 4 motors, not connected 15 This drive train uses 4 direct driven 3 omni wheels. Each wheel was driven individually to allow for multidirectional travel. This robot had a base weight of 7 lbs. October 15, 2015
Testing 16 Straight Line Speed Test Pull Test Side Drag Test Spin Test Ramp Test October 15, 2015
Conclusions 17 Test Data Straight Line Speed Test (Seconds/Amps) Pull Test (Pounds/Amps) Side Drag Test (Pounds) Spin Test (Time/Amps) Overall Robot Performance October 15, 2015
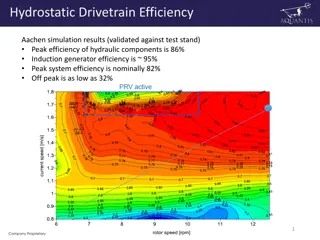
Speed Test Results 18 October 15, 2015
Pull Test Results 19 Track drive uses 3 wheels, and, therefore, gained at least 25% of power advantage compared to 4 wheels October 15, 2015
Side Drag Test Results 20 October 15, 2015
Spin Test Results 21 October 15, 2015
Quick Reference Table 22 October 15, 2015
FIRST Tech Challenge Drive Train Testing 23 Created by FTC Team #3486 Techno Warriors Advanced Complete Presentation available at: bit.ly/FTC3486 Feel free to contact us! Engineering Notebook: bit.ly/FTC3486 Email: twa3486@gmail.com Twitter: @technowarriors October 15, 2015